多机器人协作空间网壳自主搭建

指导教师

许蓁
天津大学建筑学院教授,副院长

张烨
天津大学建筑学院副教授

王祥
同济大学建筑与城市规划学院助理教授
课程介绍
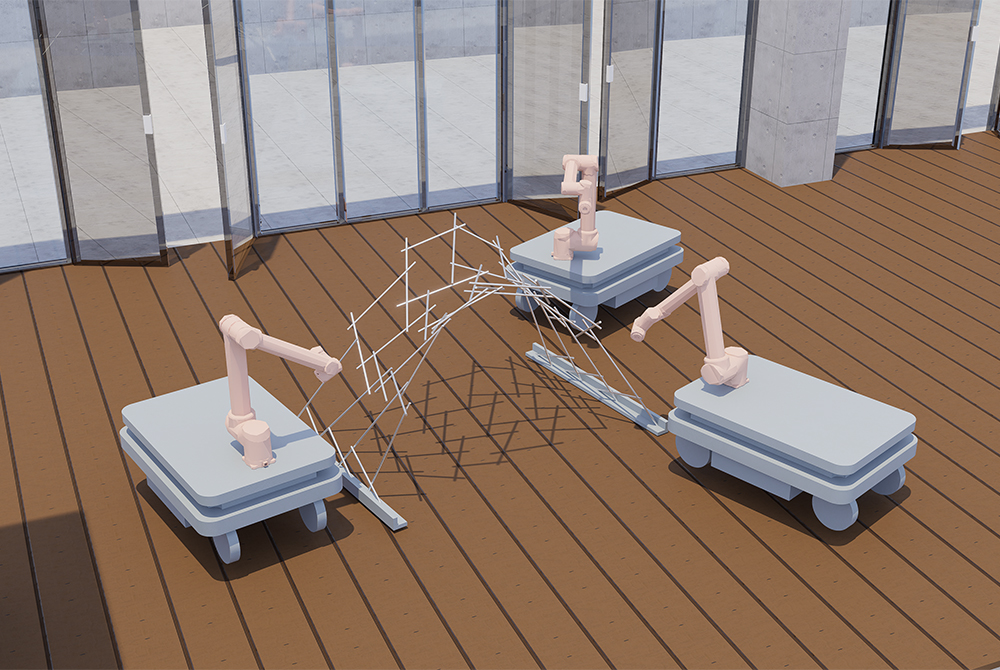
自主智能的多机器人协作作为未来自动化数字建造的前瞻方向,尤其在非结构化场地的现场施工方面,在建造的精准性、复杂性和工业化的角度展现出巨大潜力。其中除涉及全流程计算性的数字设计方法之外,还依赖于多场协同的智能感知技术、多模态数据融合技术、多机协同的自主运动规划和控制技术、以及面对精度、误差的自适应控制技术,需要复杂的系统架构和技术体系支撑。
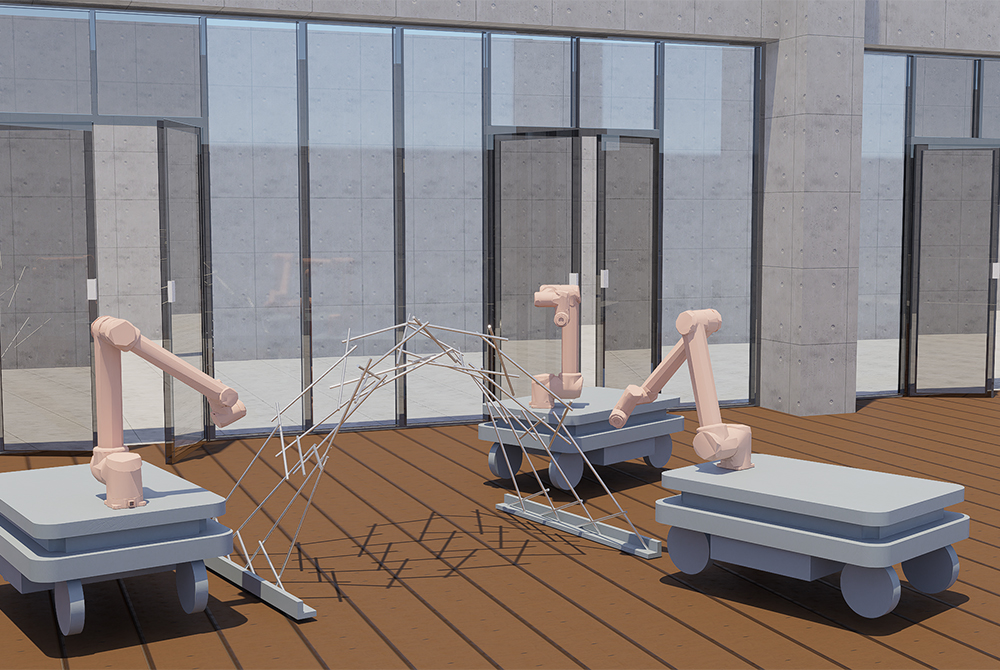
作为本次系列工作营的一部分,参与者将有机会了解并参与人机协作和多机协作的复杂空间网壳的设计到组装工作流程。在这一流程中,本课题将利用多台移动机器人工作平台,通过视觉、运动捕捉、结构光等多传感器系统融合,实现机器人的自动定位与导航;同时,参与者将会一起研发针对相关构造的工具端设计、建造方式设计、运动路径规划设计等;最终完成一个以自主智能、多机协作为目标的实验型建造项目。
课程主要讲解基于移动底盘的机器人控制策略,和ROS及Grasshopper相关系统开发方法,以及基于Nerf技术的实时空间场景建模和动态自主路径规划方法。同时,在结构设计的角度,将以一个单层网壳的设计搭建过程,讲解相关的设计技术,包括壳体找形和结构分析技术、壳体建造序列规划技术、节点和建造工艺设计等。
预期目标
利用多台移动机器人平台,搭建一个3m*4m左右的单层轻型空间网壳。研究测试相关技术的可行性和问题,以在实验过程中进行修正。
计划通过现场过程的全流程搭建技术,制作相关的展览素材。并试图在最终展览过程中,对多机器人自主决策和自主搭建的关键环节进行展示。
学员要求
- 对机器人建造相关领域有较强兴趣或前期研究、项目参与等基础(相关方向研究生或待申请学生优先)
- 熟悉或了解grasshopper基础操作及插件使用
- 建筑学、工业设计、自动化、机器人学等专业背景优先
没有帐号:请点击网页右上角“登录”按钮,点击“创建新帐号”创建您的帐号,然后登录用户中心,进入工作营报名完成报名信息的提交。
已有帐号:请点击网页右上角“登录”按钮,登录用户中心,进入工作营报名完成报名信息的提交。
© CDAC 2024 All Rights Reserved.
会议秘书处:
- 叶宇 18217268257(论文集与会务)
- 王祥 18616717626(工作营)
- 宗轩 13585999690(论文集)
- 傅嘉言 15068809763(会务)
- 闫超 18017881464(展览)

 loading......
loading......